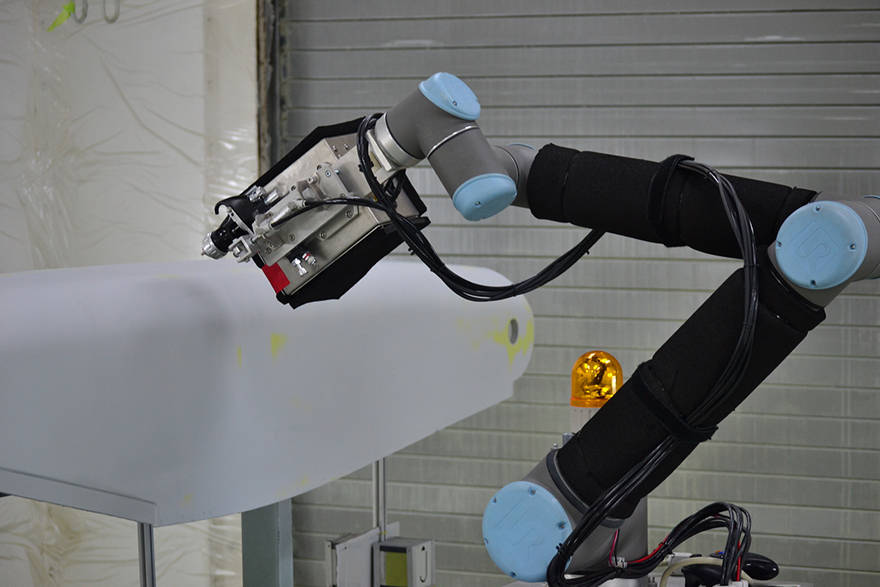
Neurobot UR10
Vision-Based Robotic Control
Developed a vision-based robotic training environment in Unity using ML-Agents to simulate a UR10 robotic arm performing paint spraying tasks, enabling training and evaluation of AI control policies in a physically accurate simulation.
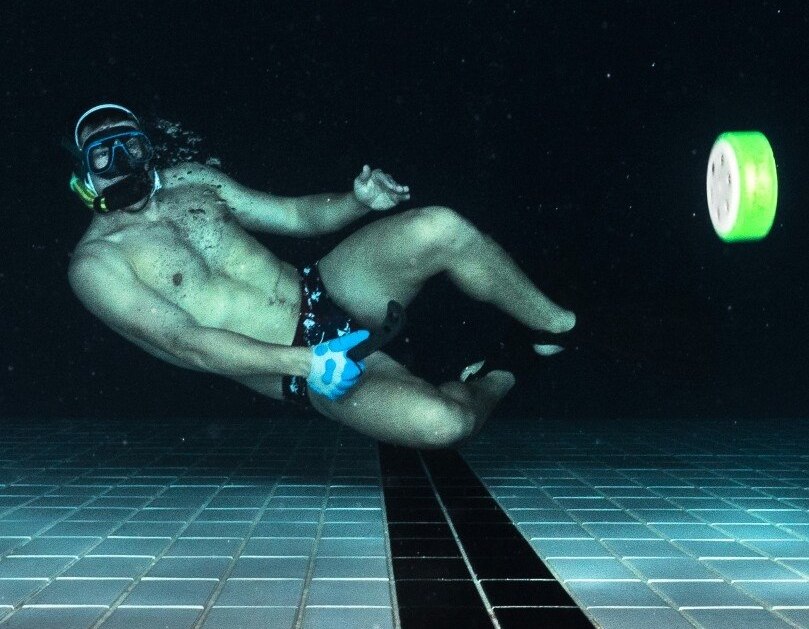
Vision Tracking in Fluid Environments
Vision-Based Underwater Hockey Tracking for Camera Guidance
In this project, a machine learning model was trained to track the location of the play for underwater hockey using self-supervised learning. This model was implemented on a underwater camera system deployed for international tournament.

Learning agents
AI-Powered Adaptive Language Learning System
An experimental AI ecosystem for personalized French learning, combining intelligent automation, adaptive feedback, and conversational tutoring. Currently focused on the first learning agent — a diagnostic and exercise generator powered by large language models — the project will gradually evolve toward a multi-agent architecture integrating reinforcement learning, spaced repetition, and motivation-aware interfaces to create a truly adaptive, human-centered learning experience.